Capstone Project: Terralift
Published on: May 22, 2025
3 min read
Terralift
A powerful mini warehouse automation robot.
Overview
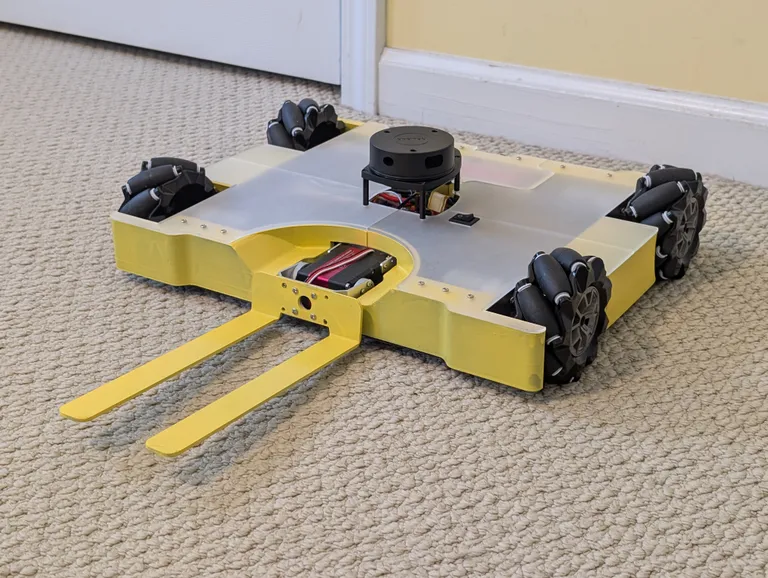
For my junior year engineering capstone project, I designed and built a mini warehouse automation robot called Terralift. The robot is capable of lifting and transporting small pallets, simulating the functions of larger warehouse robots used in logistics and supply chain management.
The robot features a robust lifting mechanism, precise navigation capabilities, and an intuitive control system. It is designed to operate in a warehouse-like environment to handle tasks such as pallet lifting, transportation, and placement.
My Research Project
Over the last decade, autonomous mobile robots (AMRs) have moved from research labs into real warehouses, hospitals, and public spaces. In these environments, robots are expected to move safely around people and obstacles while still finishing their tasks quickly enough to justify their cost. That creates a constant trade-off between safety (avoiding collisions, keeping clearance, stopping when needed) and efficiency (time, path length, energy). In Nav2, this trade-off is influenced by which local controller and global planner is picked, so these combinations are what I am testing on a real robot.
In the ROS 2 ecosystem, the Navigation2 (Nav2) stack is one of the most widely used open-source navigation systems for mobile robots. It combines a global path planner, a local controller, and a set of recovery behaviors to let robots navigate to goals in cluttered, dynamic environments. Researchers have already shown that Nav2 can run for long distances around people without collisions, and there is a large body of work on different path-planning algorithms and controller designs. However, most of this work either focuses on simulations, or on a single “best” configuration rather than comparing how different Nav2 controllers change the safety / efficiency balance in realistic tasks.
My project focuses on the industrially relevant scenario: narrow aisle navigation with pallet pickup. This scenario mimics warehouse layouts where robots must squeeze through 1.0m and 0.8m constrictions, navigate an occluded corner, and then accurately align with a pallet using an AprilTag. In these tight spaces, small changes in controller behavior (such as how aggressively it turns or how it trades speed for clearance) can make the difference between a fast, clean run and a collision.
This robot is also the basis for my senior research paper, where I am currently researching the efficiency of different pathfinding algorithms on real hardware.
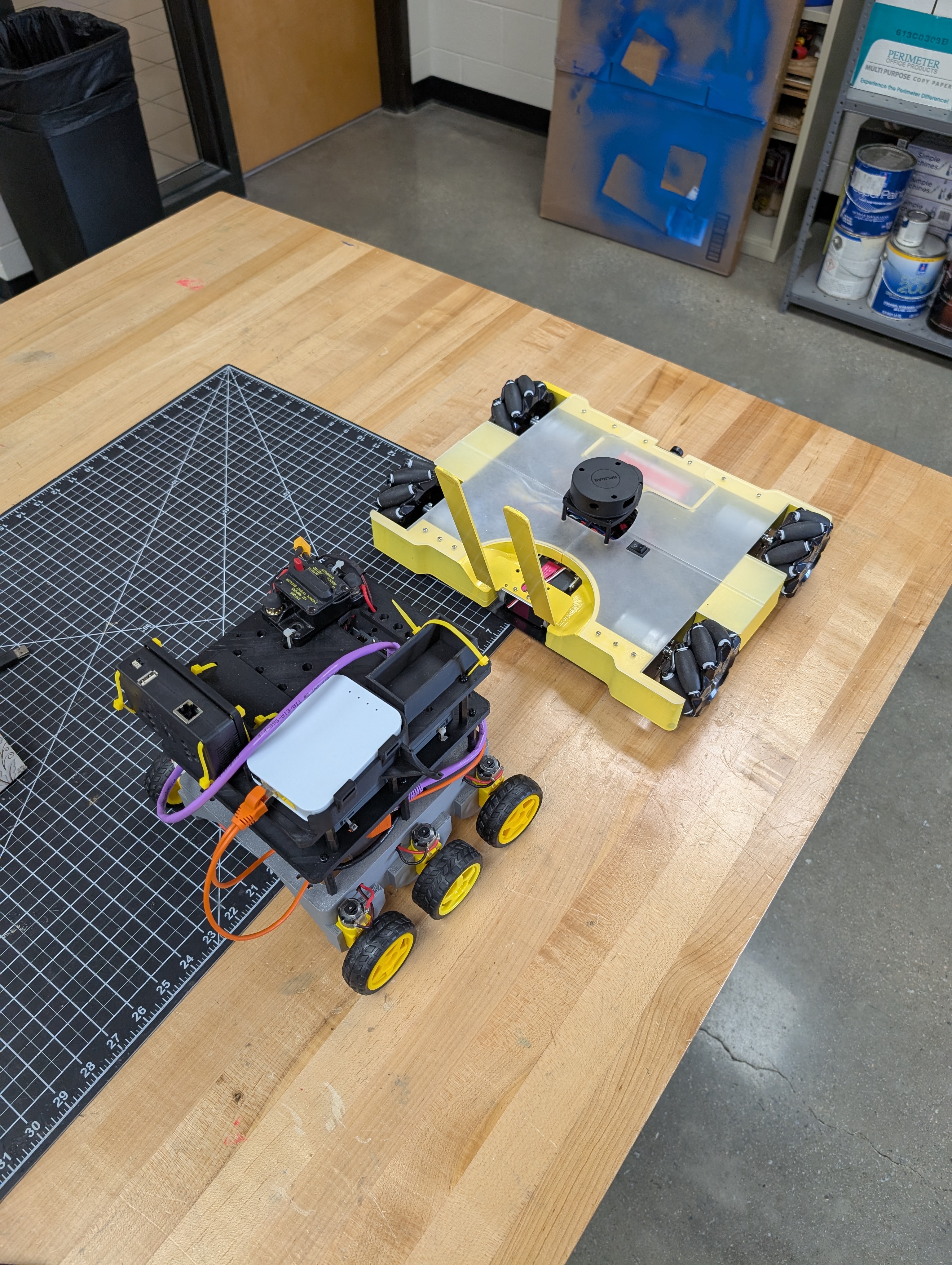
The Terralift robot next to a previous robotics project I designed for new members to improve their electrical design skills:
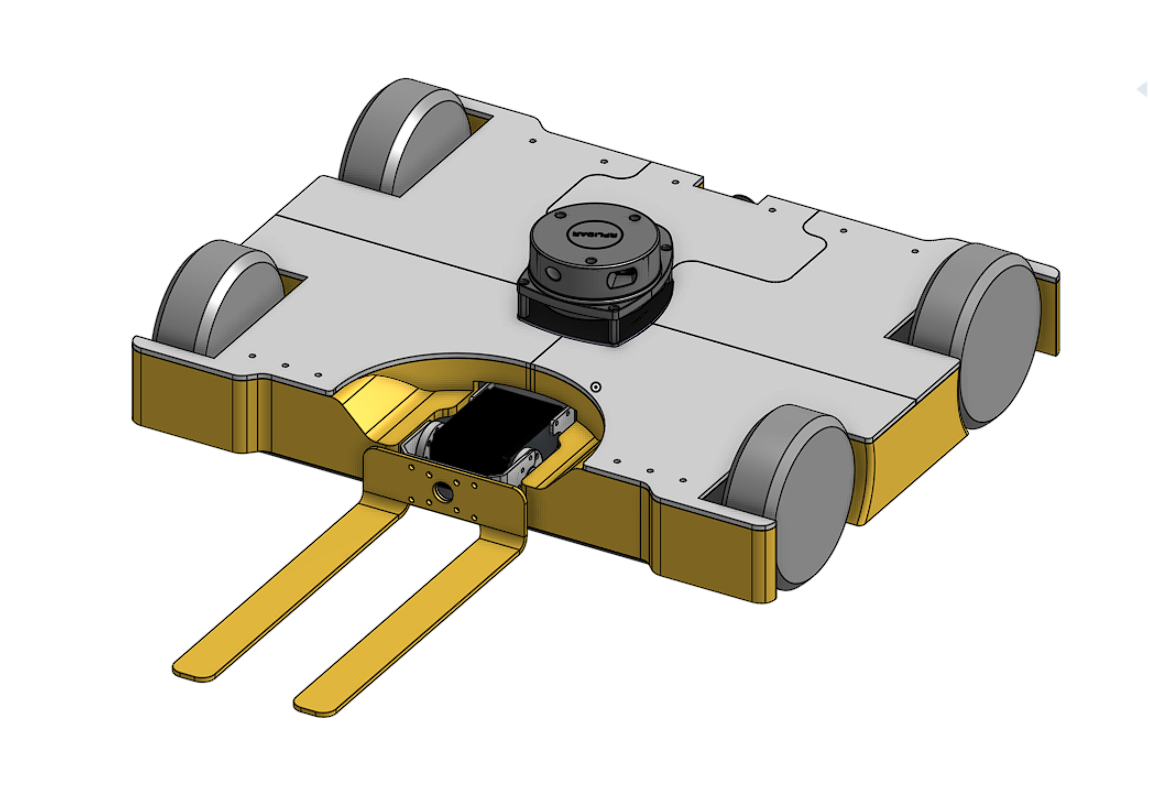
Design and Construction
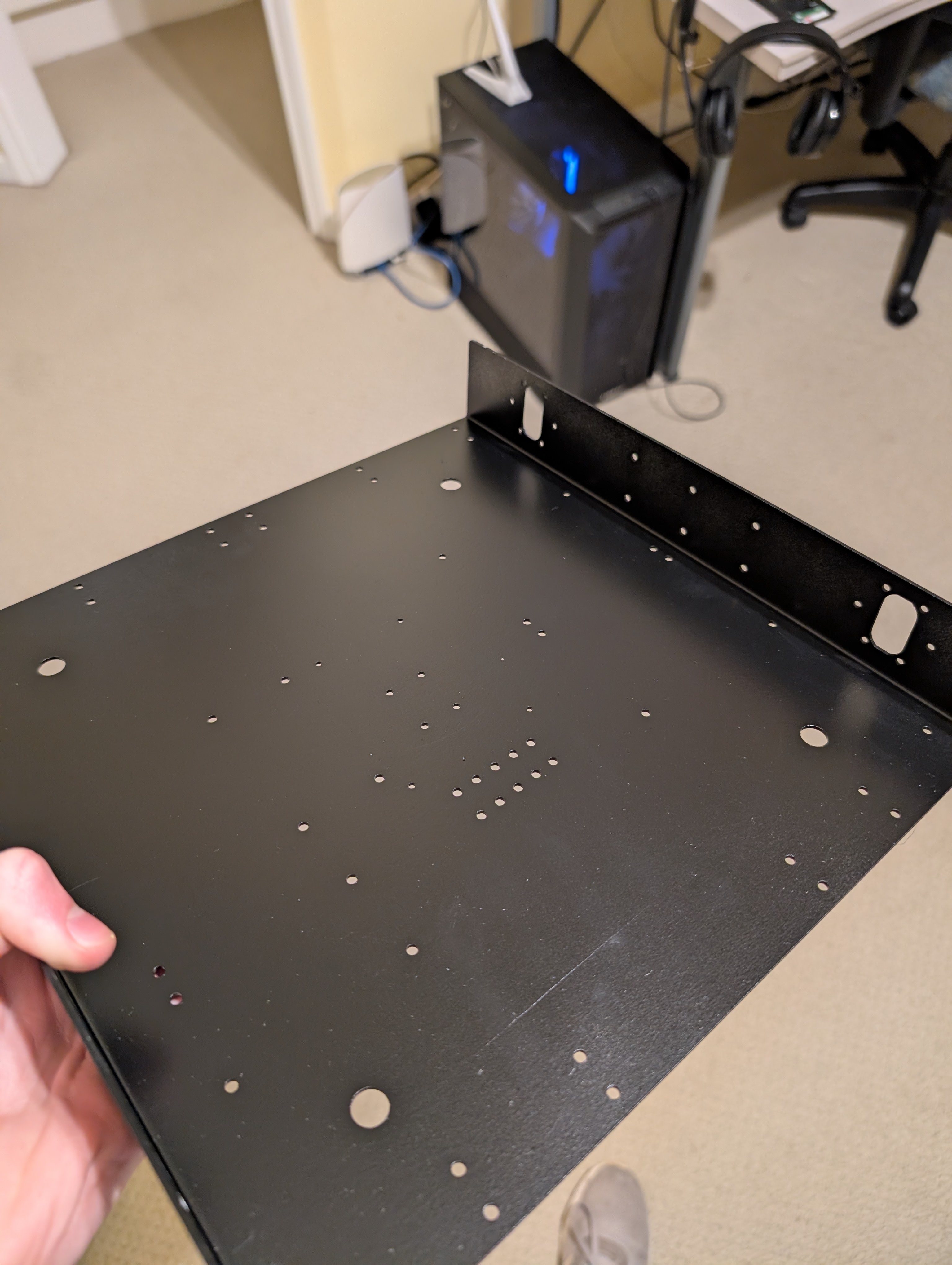
The design process began with CAD modeling to create a detailed representation of the robot’s structure and components. The robot’s chassis was constructed using steel for durability. The lifting mechanism was designed to handle weights up to a theoretical 10-15kg. The robot is powered by four high-torque motors, providing the necessary force for movement and lifting objects.
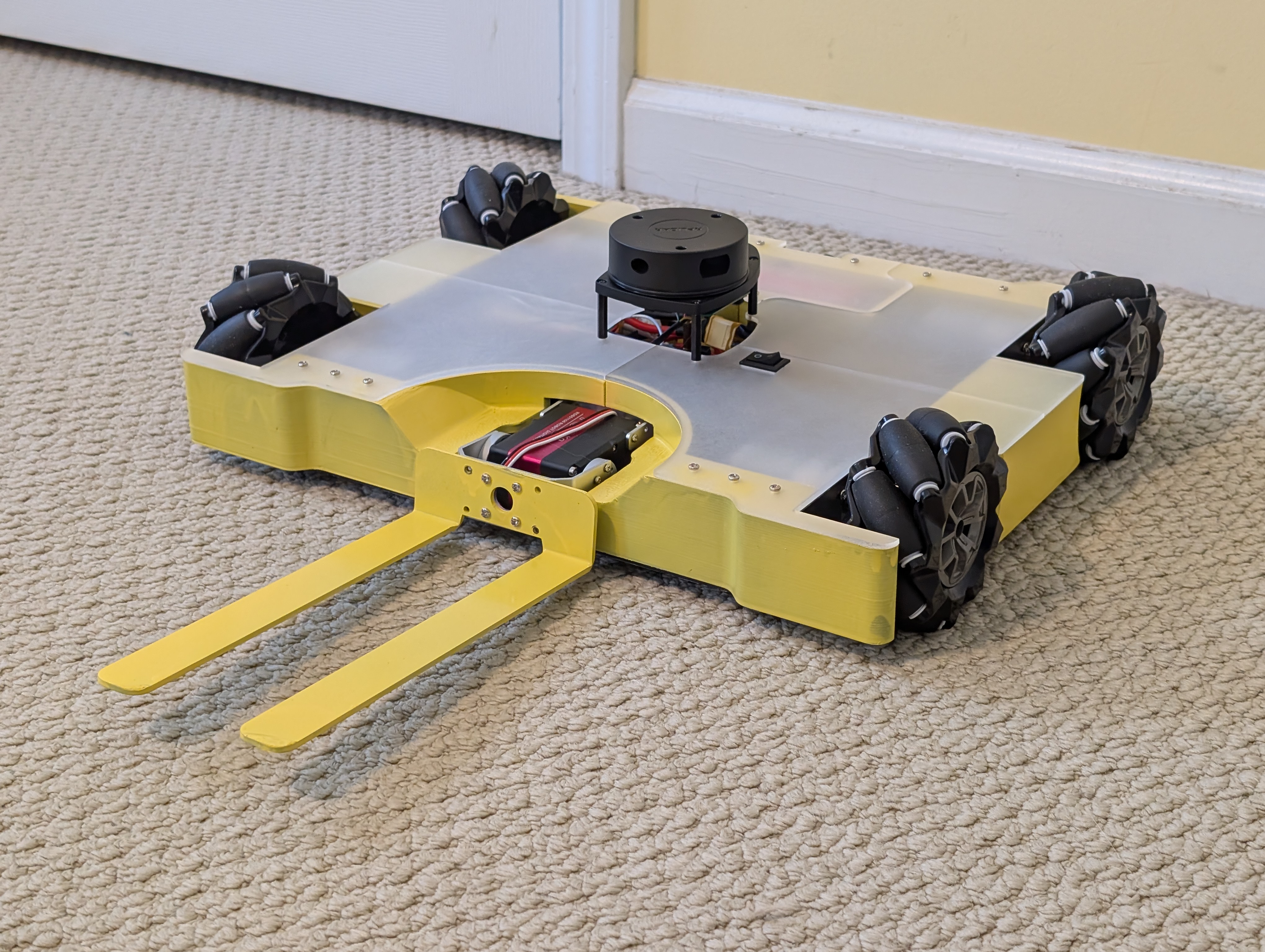
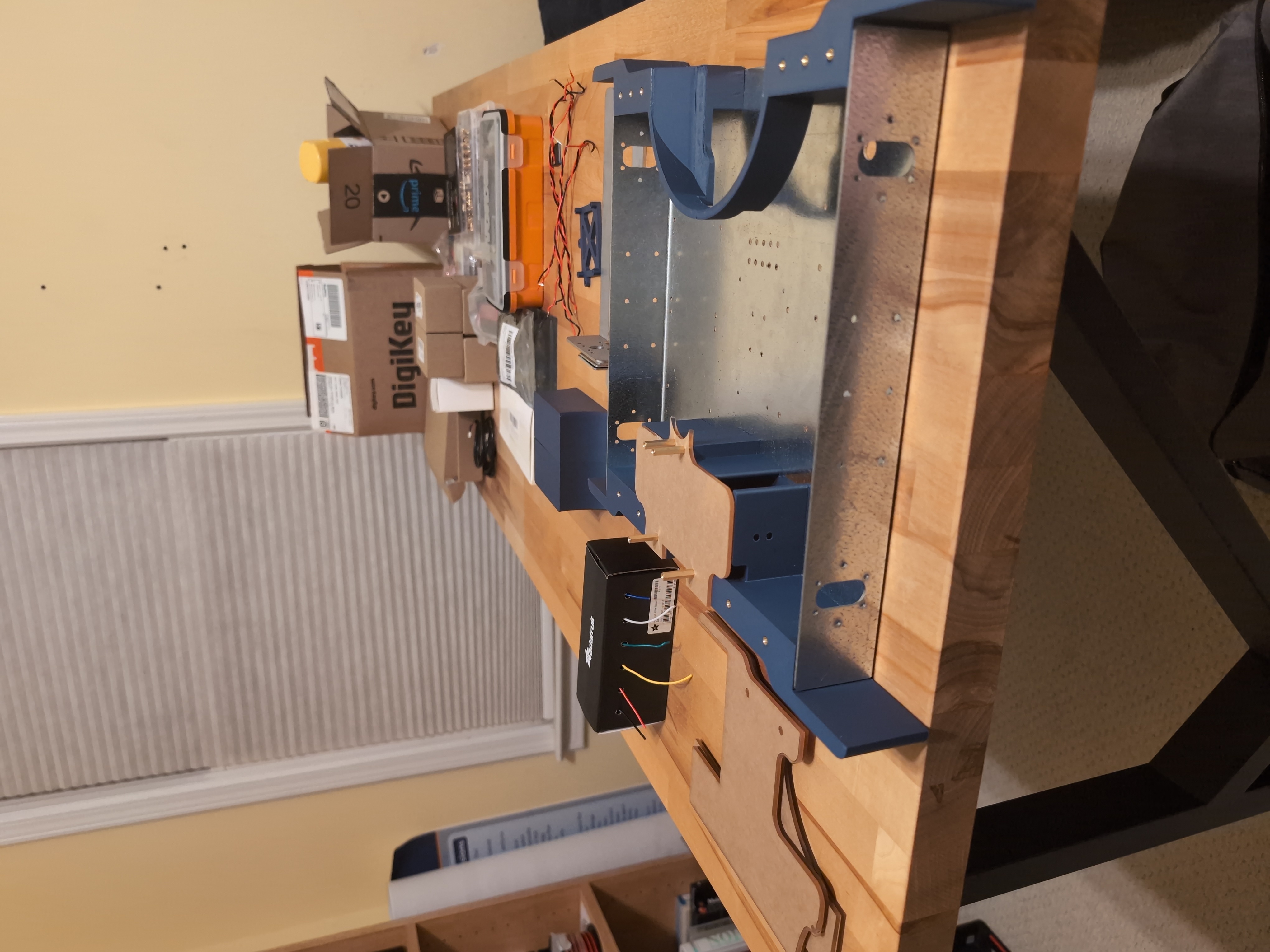
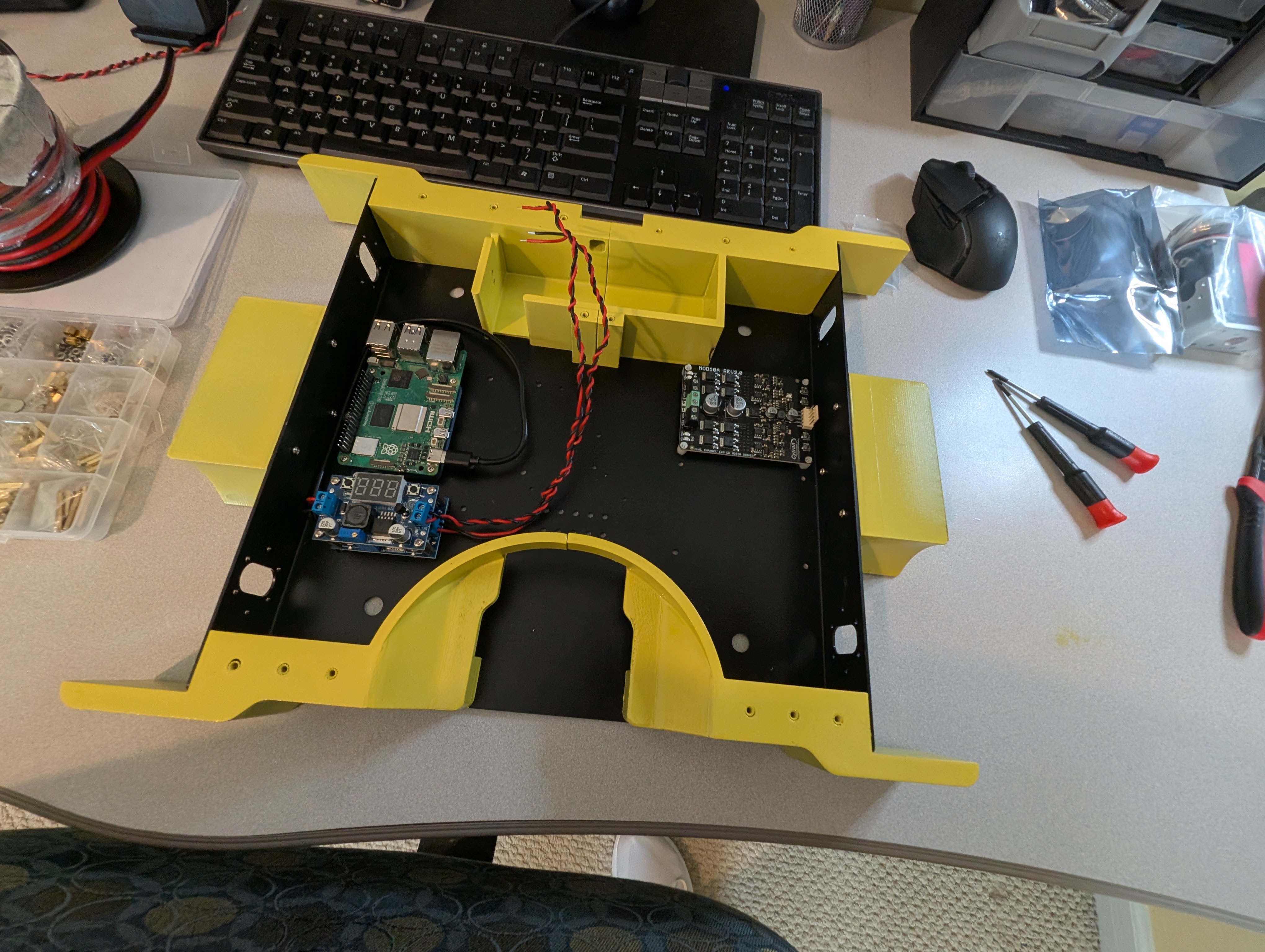
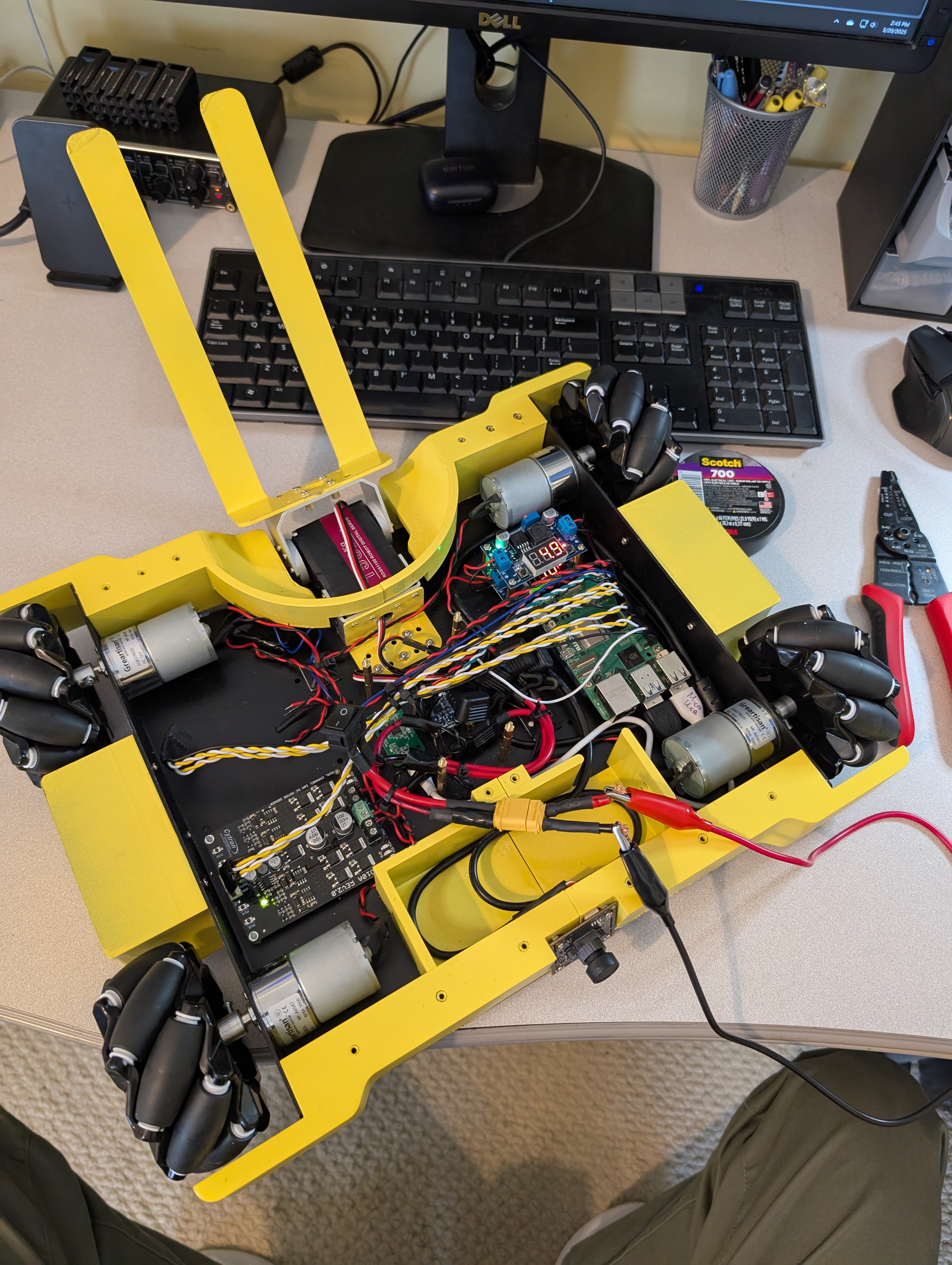
I first did a dry fit of all the components to ensure everything fit together properly before painting.



Live Robot Testing
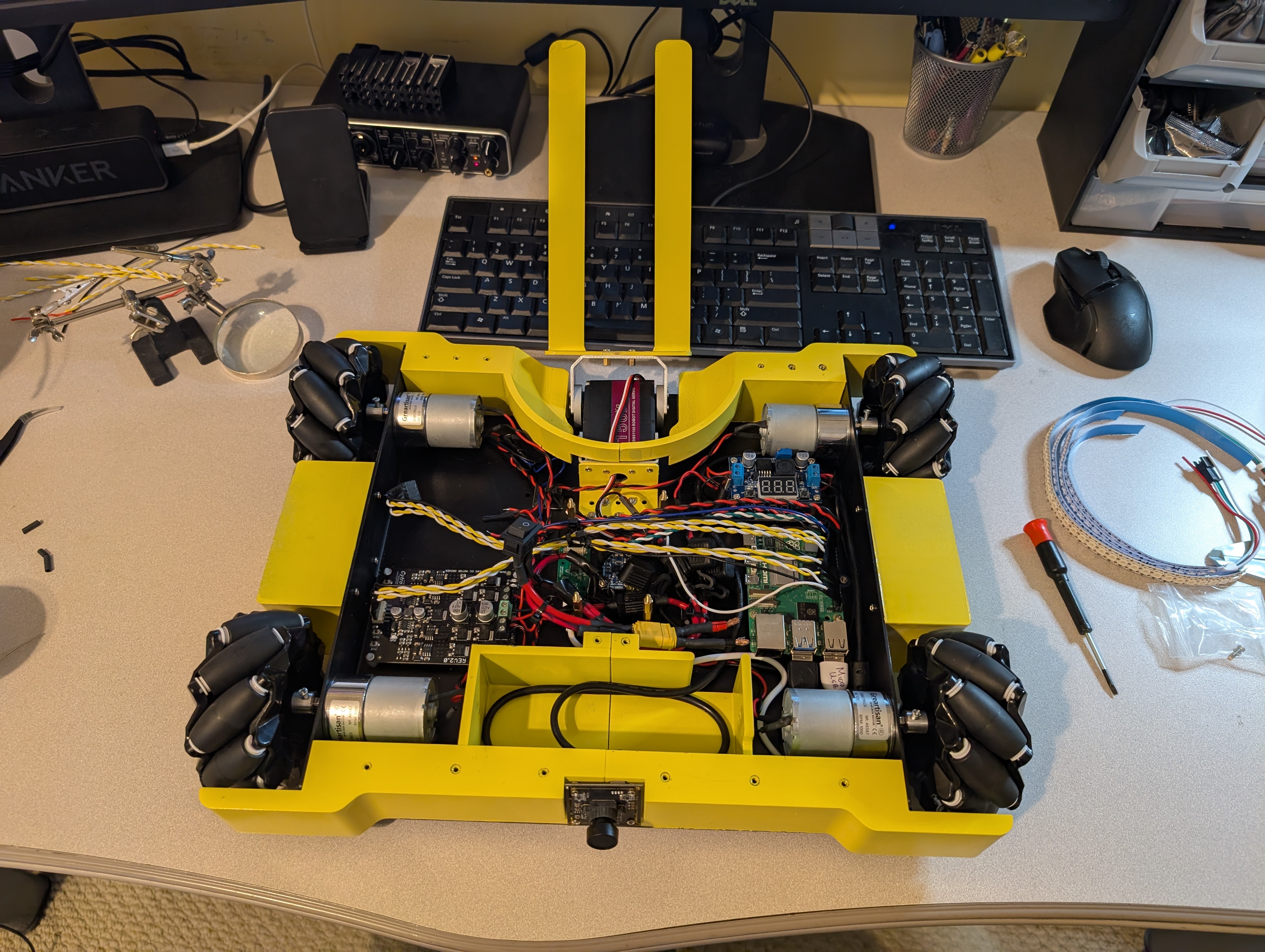
Here is one of the first videos I took of the robot driving around. The top plate was off at the time to allow for easy access to the electronics. Here the robot is programmed for driver oriented control, meaning that pushing the joystick forward makes the robot go forward relative to the driver, not relative to the robot’s orientation.
I then tested what the robot could lift: